人机交互步态实验室
Human-Robot Interactive Gait Lab
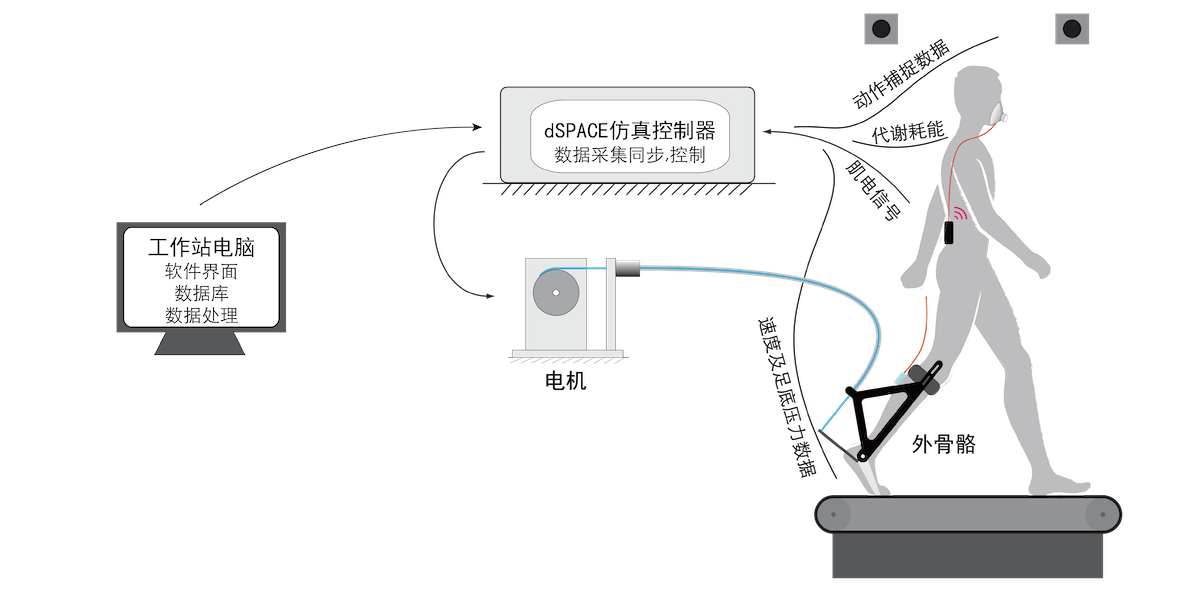
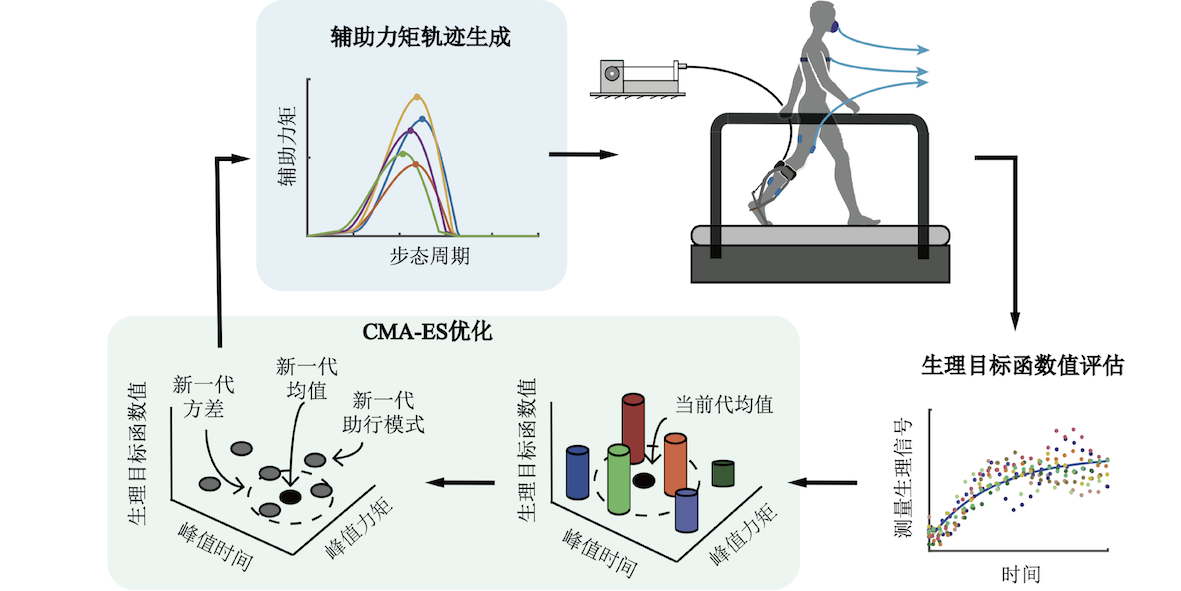
南开大学人工智能学院人机交互步态实验室成立于2017年。实验室以“人在环中”方法为核心, 利用结构设计、控制理论、优化算法、人机耦合仿真、步态实验等手段, 致力于实现外骨骼机器人对不同人群步态的安全、舒适、有效康复、辅助及替代。负责人张娟娟教授, 2016年博士毕业于卡耐基梅隆大学。其利用“人在环中”方法, 将外骨骼的性能提升至之前领域最佳成绩的228%, 确定了此方法在人机交互系统中的导向型地位。此成果以一作发表于Science主刊, 是辅助机器人领域发表于该刊的第一篇研究类论文。
人机交互步态实验室现面向全国招收2023年秋季入学的硕博生。欢迎优秀的控制、机械、电子等相关专业同学积极报名! 有意者请联系实验室负责人张娟娟(juanjuanzhang@nankai.edu.cn), 亦欢迎联系课题组同学了解相关情况。